Autonomous Sailing Robot Project
Sailing robot is an autonomous ship, using sustainable wind energy as the only source of propulsion. It can be used in long-term oceanographic survey, routine monitoring of water quality, tracking of marine animals. This student lead project started in January 2016 with the goal of designing and building an open-source sailing robot system. We participate in competitions at world level, organize open-day activities, write blog posts, and give presentations about the future of autonomy and clean energy.
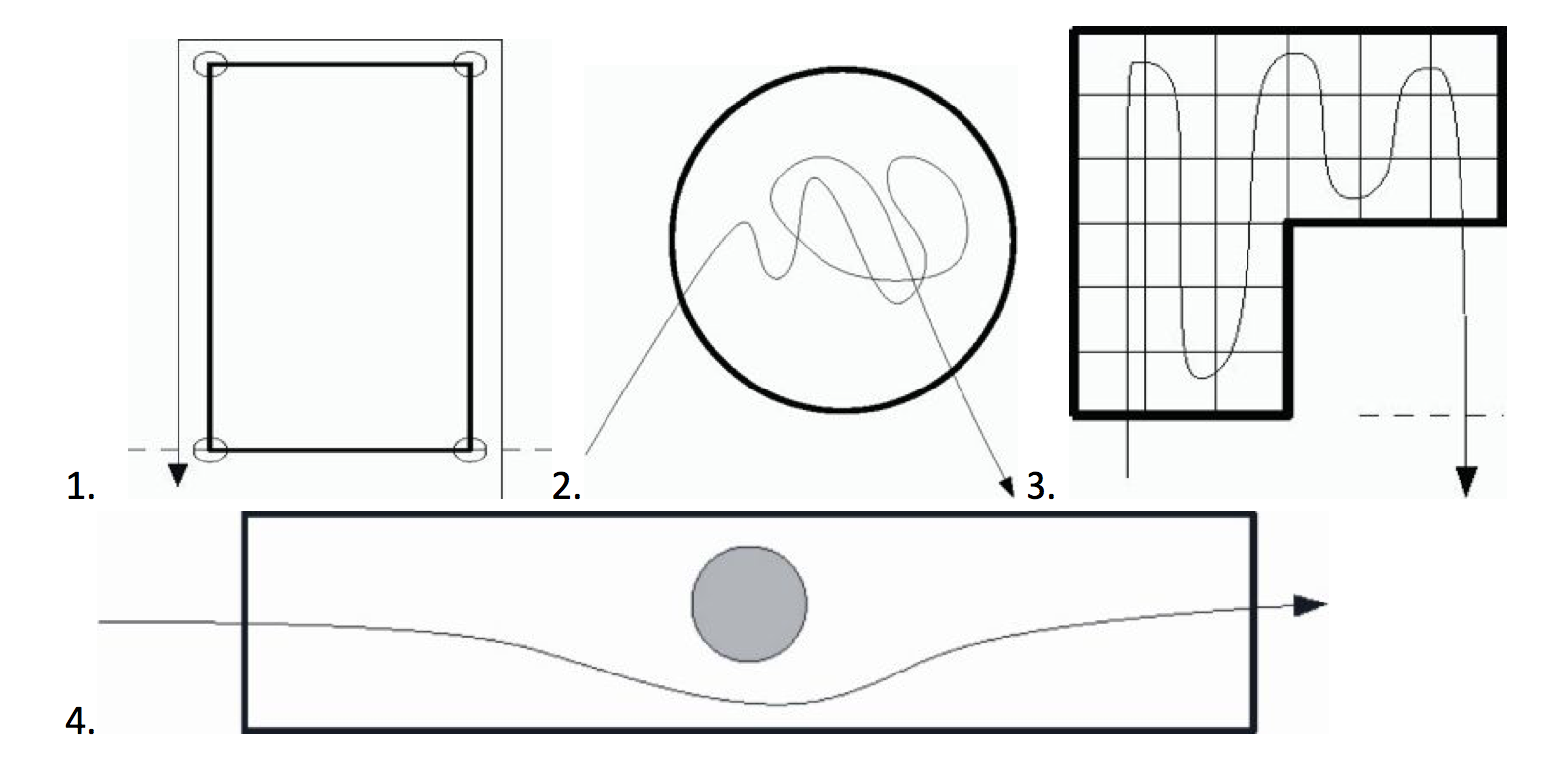
Competition challenges
Southampton Sailing Robot Team started participating in the World Robotics Sailing Competition (WRSC) from 2016. This competition has four challenges. The team achieved the best overall performance win the World Champion title.
 |
|
The team and our boat
Those challenges might seems straight-forward, but to tackle them it do requires huge effort by many people. It hard to be done without team work. Our team is formed by students at University of Southampton with various backgrounds: ship science, electrical engineering, computer science, robotics and management.
 |
Here is the team and our boat, her name is The Black Python: |
No matter how complex each challenges might be, it could achieved by many several maneuverers. We developed a task based mission planning system that generate waypoints for each challenges. Those waypoints can either be single or multiple, stationary or dynamic based on the challenges. We also teach her how to sailing in different wind condition especially towards the wind by programming tack and jibe maneuverers. Please refer our wiki for details.
Competition result
The followings are maps with actual GPS trace taken from 2016 competition result. In general, those challenges turns out to be much harder than we expected.
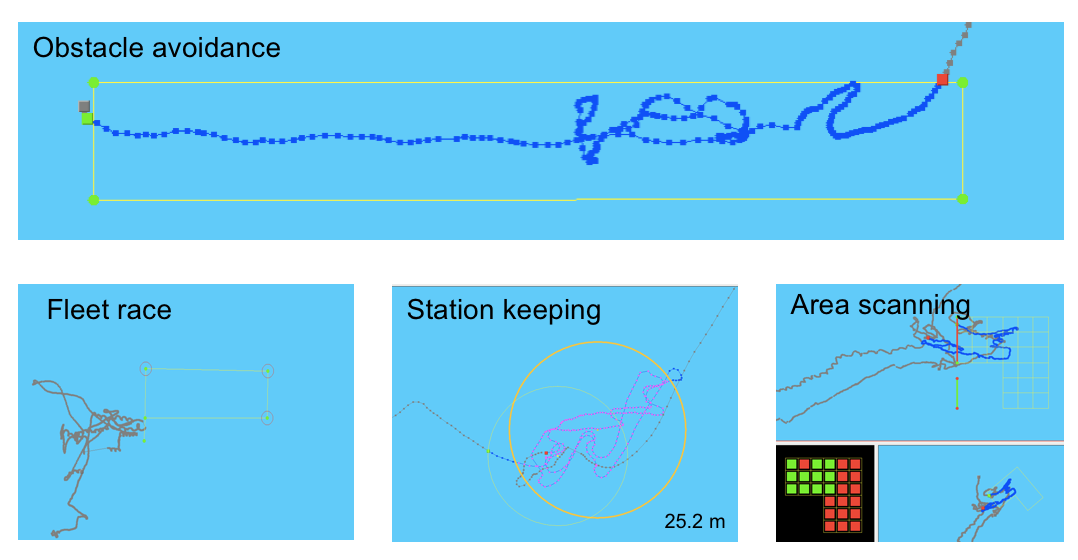
You may already notices her struggle in reaching the start-line during the fleet race. Strong ocean current push the sailing robot back every time when she try to tack towards the start line and the rapid changing wind condition make it worse. Also human error made under intensive competition pressure is an important factor.
But we quickly learn from mistakes and try to figure out the root cause of that. The rest challenges are accomplished with an acceptable result. You can read more stories on our blog. The awrad is given upon the team with best overall performance, even we are not all perfect but successfully finish three out of four challenges place ourself as champion of 2016 World Robotics Sailing Championship.
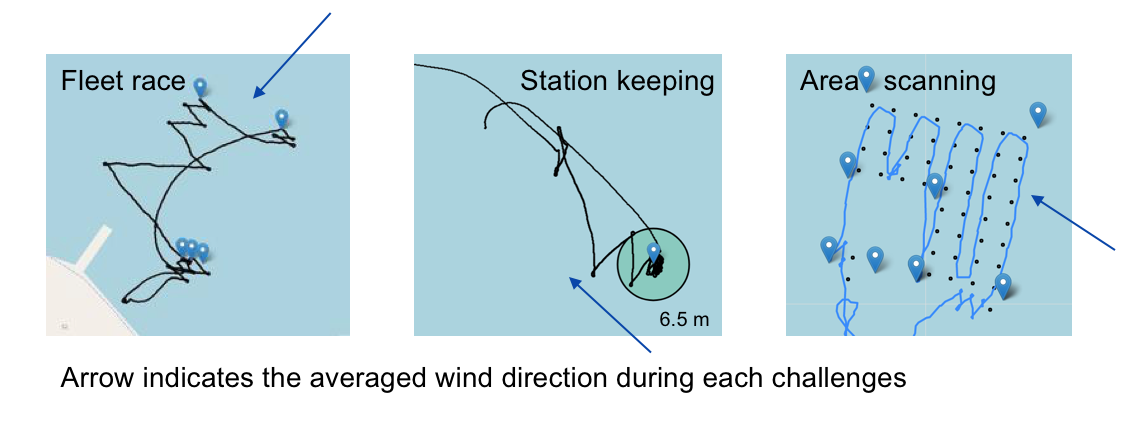
As we are getting more experienced, in 2017 most effort was made on the improvement of the system. We have implemented sensor fusion algorithm on board, developed a new dashboard, wrote before run selftest scripts, and do many tests. The competition result is better and we secure our champion title.
Future plan and some random thoughts
To further facilitate the robotics sailing, we host 2018 competition at Southampton. We welcome everyone who are interested in the sailing robot, marine autonomy, and clean transportation to join this competition and the conference. Details are available on the official competition website.
One of the FAQs we had is “Why you want to the boat sailing by itself? Do you want to replace human sailors?”
This question is frequently raised by the public when we were doing test on open waters. We think the role of robot is rather supplementary than substitutional. It do what human sailors can't or won't do such as do station keeping and area searching that recreational sailor would easily get bored. People will still have fun on the water and those boring and tedious job was handle by robots. It might sounds unfair to robots but that's the reason why we design them.
Can this be the Uber on water or replace container ship? Is there any commercial available product?
Saildrone is doing this as their business, it looks impressive.
I couldn't see any reason why we couldn't have autonomous passenger sailing ships. It might even not need to be charged. Electrical control, similar to autonomous driving cars’ drive-by-wire, is already exist on sailboats.
Container ships are much faster and more capable than the old time sailbots of which are already big. Technically, the fully autonomy would be possible but I could see challenges in ship structures, capability and economic performance.
How to started to build my own sailing robot?
Radio controller sailing boats are easy to source and that can be a good start for your project. Radio control it first to get the feeling of sailing if you have never done that before.
Main controller, GPS, camera and IMU can be relatively cheap, source them online. wind sensor with enough resolution is either too heavy or too expensive. You can DIY one of them follow this instruction
Learn bit ROS and Python (or Cpp) programming. Join WRSC mailing list for some professional advices
Test it, break it, repair it, over and over again